Aim4Pass


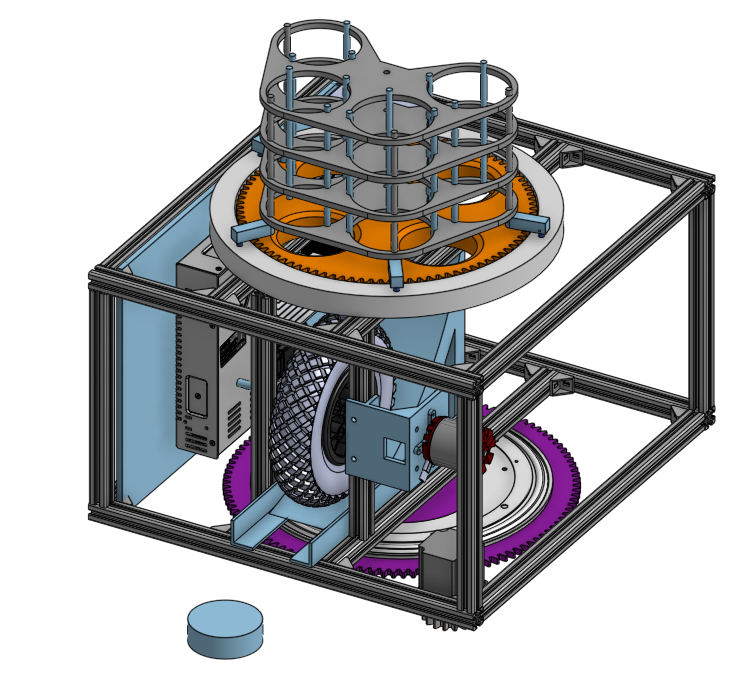
The Aim4Pass (A4P) was built to replace existing static hockey passing drills by acting as a training partner. The robot is capable of tracking skaters and accurately passing pucks along the skater's path. Smart nets are then set up to represent dynamic passing and shooting options in the offensive zone.
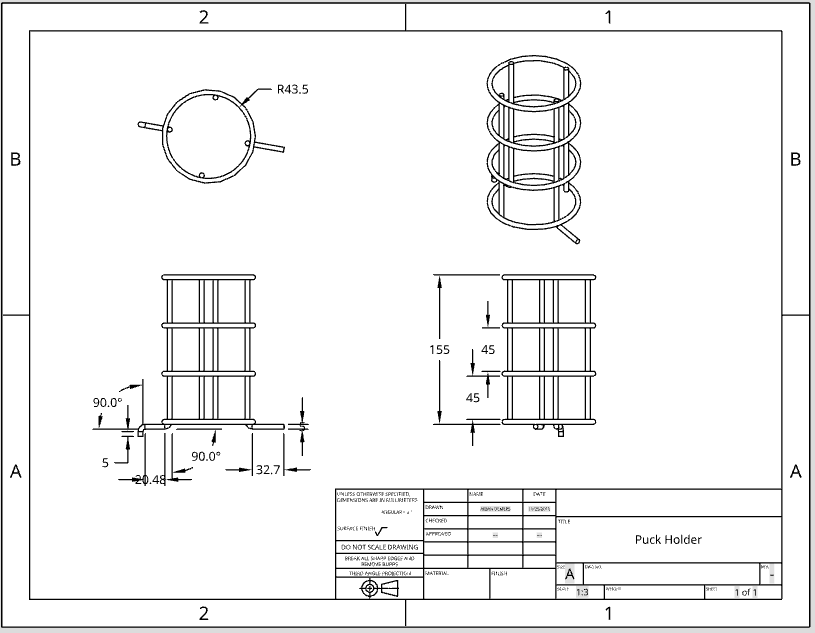
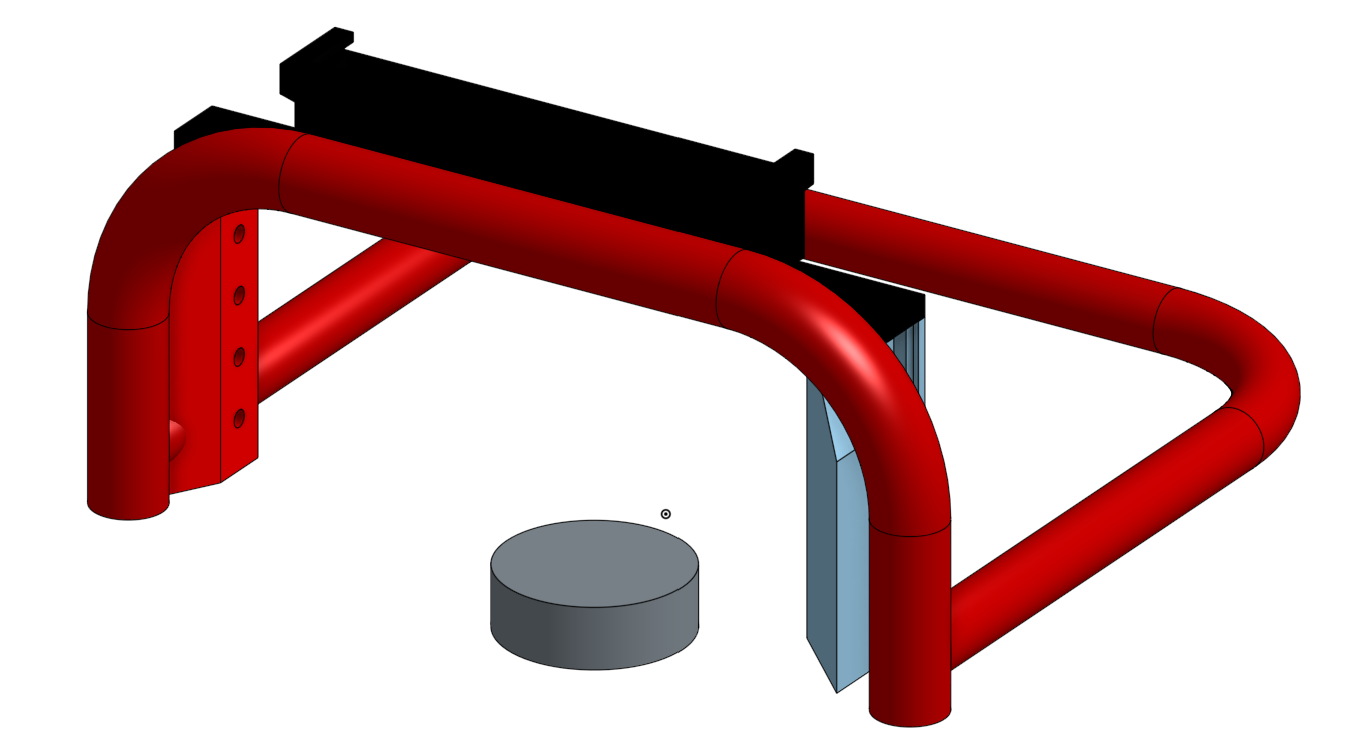
Devised a puck launching mechanism, which used a rubber wheel to accelerate pucks down a ramp. Simulated different slopes to ensure maximum contact time with the puck while also preventing puck jams.
Developed a skater trajectory algorithm that used a Kalman filter to estimate the joint probability distribution of the skater trajectory and recursively correct for inaccuracies of the model.
Designed the stereoscopic camera and player tracking algorithms. A Semi-Global Block Matching (SGBM) algorithm was implemented to rectify the stereoscopic images.
Finalist for the Best 4th-Year Capstone award. Link to design presentation.